

Verkeersdoden zijn de belangrijkste oorzaak van vroegtijdig overlijden van mensen onder de 30 in de VS. De meeste zijn voetgangers en fietsers.
Elke menselijke activiteit die wereldwijd 1,35 miljoen doden veroorzaakt, meer dan 20 miljoen gewonden, een totale schade van 1.600 miljard dollar en een belangrijke oorzaak is van de opwarming van de aarde zou onmiddellijk worden verboden[1]. Met uitzondering van het verkeer, omdat het nauw verbonden is met onze manier van leven en commerciële belangen.
De meeste burgers zijn gewend aan de alomtegenwoordigheid van auto’s, koesteren de voordelen ervan en zijn immuun geworden voor hun kosten, die ongeveer 20% van het gemiddelde gezinsinkomen bedragen. De infrastructuur van steden over de hele wereld wordt gedomineerd door auto’s, wat niet verwonderlijk is, aangezien de investeringen in wegen voor auto’s wereldwijd $ 1.000 miljard per jaar bedragen[2]. Zonder ingrepen zullen het wereldwijde autobezit en autogebruik de komende 30 jaar exponentieel groeien. Toch staan 96% van de tijd auto’s stil.
Vision Zero Cities zoals Oslo en Helsinki spannen zich in om het aantal verkeersdoden in het verkeer de komende tien jaar tot nul terug te brengen.
Dit artikel maakt deel uit van een reeks essays over hoe steden menselijker kunnen worden. Dat betekent een balans vinden tussen duurzaamheid, sociale rechtvaardigheid en kwaliteit van leven. Dit vergt verregaande keuzes. Als deze keuzes eenmaal gemaakt zijn, is het vanzelfsprekend dat we slimme technologieën gebruiken om deze doelen te bereiken. De essays die al zijn verschenen, zijn hier te vinden.
Menselijk lijden veroorzaakt door verkeersongevallen is te meer onaanvaardbaar omdat de oorzaken van ongevallen bekend zijn: Snel rijden en het ontwerp van de wegen. Het gebruik van alcohol en drugs, vermoeidheid en ziekte zijn mediërende variabelen. Aangezien het veranderen van het gedrag van bestuurders tot dusver moeilijk is gebleken, is de belangrijkste vraag of veranderingen in het ontwerp van wegen en van auto’s zelf, een oplossing kan bieden.
Om deze vraag te beantwoorden, bestaat dit artikel uit twee delen. Het eerste deel onderzoekt de relatie tussen de structuur van wegen en veiligheid. Het gaat na hoe verbeteringen in het ontwerp van wegen gedragsverandering van weggebruikers kunnen afdwingen en de effecten van ongevallen kunnen verminderen. Het tweede deel richt zich op auto’s en onderzoekt vooral of ‘zelfrijdende’ auto’s zullen bijdragen aan de veiligheid op de weg.
Wegontwerp en veiligheid
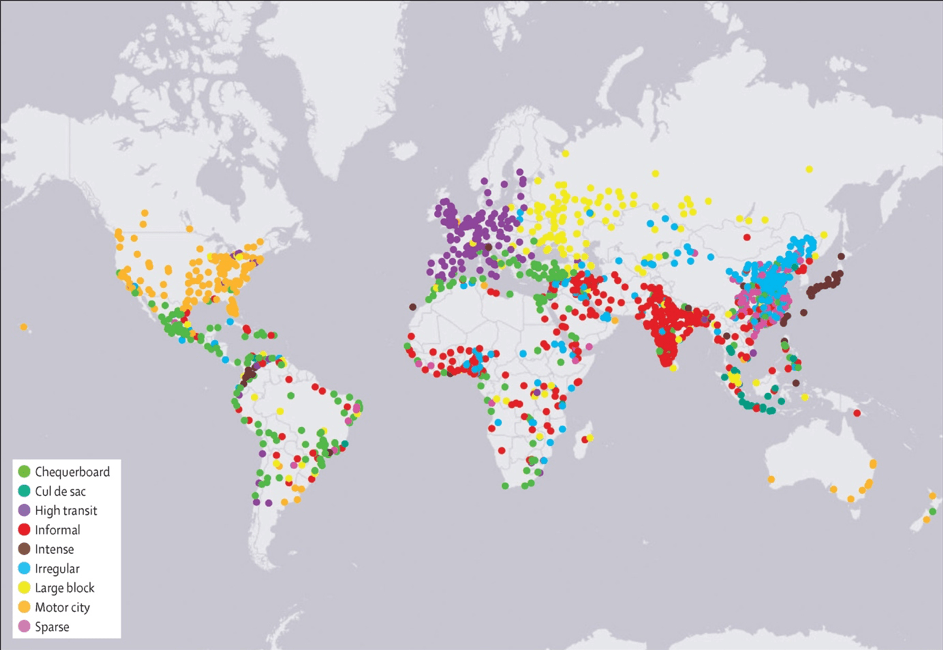
Onderzoekers van verschillende universiteiten in de VS, Australië en Europa hebben de relatie bestudeerd tussen het wegenpatroon, overige kenmerken van de infrastructuur en de verkeersveiligheid of het gebrek daaraan. Ze vergeleken het wegenpatroon in bijna 1.700 steden over de hele wereld met gegevens over het aantal ongevallen, gewonden en verkeersdoden. De studie verdeelde deze steden in negen groepen (zie onderstaande kaart). Hoofdonderzoeker Jason Thompson concludeerde: Het is vrij duidelijk dat plaatsen met meer openbaar vervoer, met name per spoor, minder ongevallen hebben[3]. De resultaten zijn gepubliceerd in Lancet Planetary Health[4].
Minder autogebruik en toenemend gebruik van openbaar vervoer, lopen en fietsen zijn overigens ook de belangrijkste aanjagers van de de leefbaarheid van steden in het algemeen.
Zoals op onderstaande kaart te zien is, gelden deze kenmerken in de eerste plaats voor Europese steden. Grote Amerikaanse steden hebben ook het openbaar vervoer uitgebreid, maar de straten worden gedomineerd door auto’s, waardoor er minder ruimte overblijft voor andere weggebruikers.
Bescherming van zwakste weggebruikers
De meeste ongevallen gebeuren in ontwikkelingslanden en opkomende landen. Verkeersdoden in ontwikkelde landen nemen af. In de VS van 55.000 in 1970 tot 40.000 in 2017. De belangrijkste reden is dat auto’s hun passagiers beter beschermen. Dit geldt niet voor de overige weggebruikers:
In de VS neemt het aantal botsingen van auto’s met voetgangers en fietsers met dodelijke afloop meer dan in enig ander ontwikkeld land aanzienlijk toe[5].
Het aantal fietsstroken is toegenomen, maar aanpassingen aan de inrichting van de rest van de wegen en van de snelheid van het gemotoriseerde verkeer bleven achter, waardoor fietsers worden blootgesteld aan de nabijheid van snel rijdende of parkerende auto’s.
Vooral SUV’s blijken ‘killers’[6] en hun aantal groeit snel[7].
Vision Zero Street Design Standard
In 2019 zijn in Helsinki en Oslo geen dodelijke slachtoffers gevallen. Deze en andere steden gebruiken de Vision Zero Street Design Standard, een gids voor het plannen, ontwerpen en bouwen van straten die levens redden.
Verkeersongevallen zijn vaak het gevolg van snel rijden, maar worden in feite veroorzaakt door wegen die snel rijden mogelijk maken en uitlokken.
Om zich te kwalificeren voor een Vision Zero-ontwerp, moet aan drie voorwaarden worden voldaan:
- Ontmoedigen van snelheid door ontwerp.
- Stimuleren van lopen, fietsen en openbaar vervoer.
- Zorg voor toegankelijkheid voor iedereen, ongeacht leeftijd en fysieke mogelijkheden.
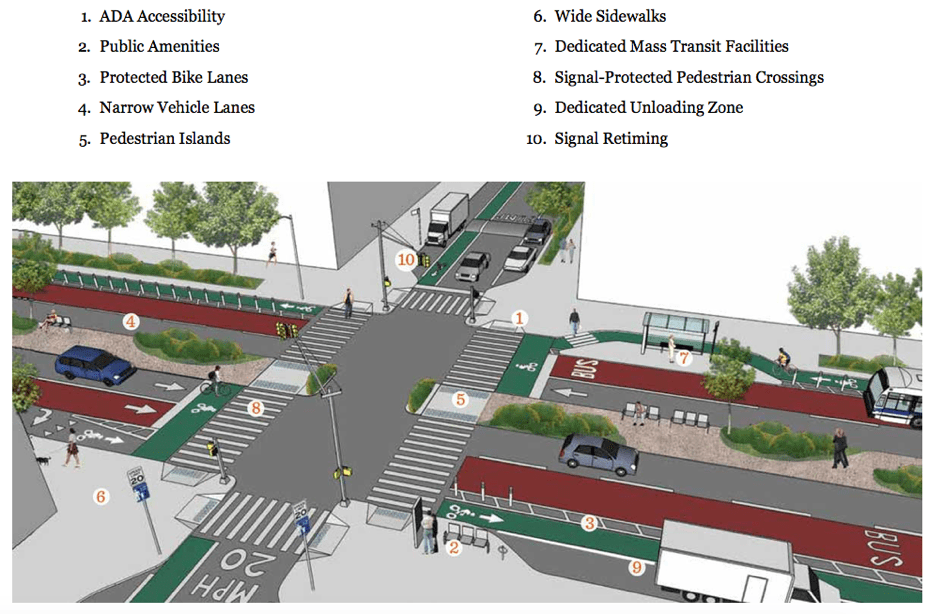
Deze voorwaarden resulteren in de tien principes van Vision Zero, die veiligheid inbouwen in het straatontwerp en zo automobilisten conditioneren tot veilig gedrag en voorkomen dat fouten tot ongevallen leiden (zie onderstaande afbeelding; ADA betekent ‘Americans with disabilities’ law)[8]
Scheiding van weggebruikers
Wegenbouw draagt bij aan het voorkomen van ongevallen. Vooral in Europese steden zijn de afgelopen decennia grote verbeteringen doorgevoerd. Een van de meest effectieve maatregelen is de aanleg van aparte rijstroken voor alle categorieën verkeer.
Stoepen bestaan al jaren, maar zijn in veel gevallen te smal geworden vanwege het toegenomen aantal gebruikers.
De afgelopen decennia zijn op grote schaal vrij liggende fietspaden en rijstroken voor bussen aangelegd en ze hebben allemaal bijgedragen aan een veiliger verkeer. Al deze vrije banen hebben echter veel kruisingen, en ondanks bescherming met verkeerslichten vormen ze een potentieel risico, in de eerste plaats omdat het overzicht beperkt is en in veel gevallen niet van elkaar gescheiden zijn. Bovendien moeten auto’s vaak fietspaden kruisen om te parkeren of om goederen af te leveren.
Andere voorbeelden van interventies om wegen veiliger te maken zijn rotondes, vooral omdat ze de snelheid verminderen en meer duidelijkheid creëren. Hetzelfde geldt voor verkeersdrempels, die in feite een straf zijn voor mensen die te hard rijden.
Aanleg van fietsstroken
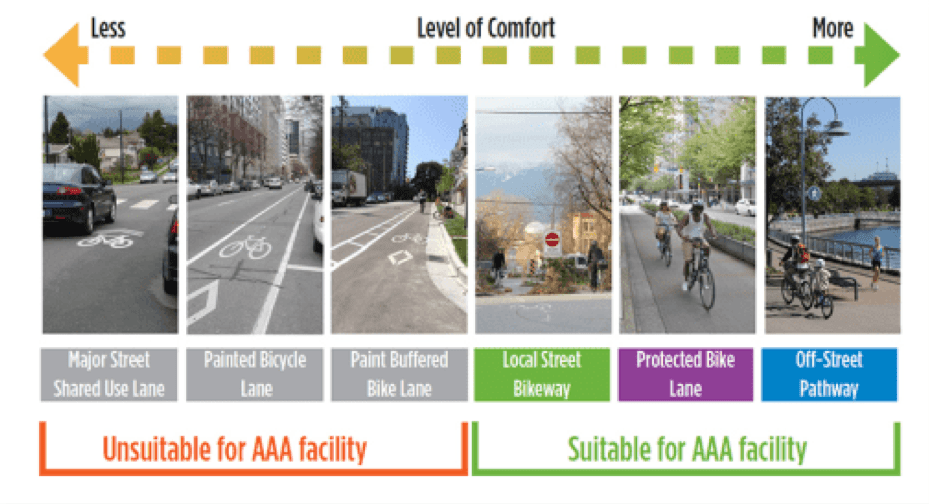
In veel Amerikaanse steden is verf het belangrijkste materiaal voor de aanleg van fietspaden. Door de nabijheid van het verkeer draagt dit type fietspaden bij aan het toenemende aantal verkeersdoden. De Canadese stad Vancouver, die het aantal fietspaden in vijf jaar tijd verdubbelde tot 11,9% van alle straten in het centrum, heeft de ambitie om de fietsinfrastructuur voor 100% te upgraden naar een AAA-niveau (safe and comfortable for all, ages and abilities). Fietspaden moeten technisch veilig zijn: breed minimaal 3 meter bij tweerichtingsverkeer; gescheiden van ander verkeer, dat anders de snelheid moet verlagen tot minder dan 30 km/uur). Gebruikers moeten zich ook veilig voelen. De stad publiceerde al haar ervaring in een online set AAA-ontwerprichtlijnen[10].
Snelheid en wetgeving
Risico’s verbonden aan de rijsnelheid zijn contextueel en hangen af van de tijd die nodig is om een voertuig tot stilstand te brengen als de omstandigheden dat vereisen. Daarom is het in sommige landen in woonwijken verplicht om stapvoets te rijden.
Strikte regels met betrekking tot maximale snelheid vereisen naleving en wetshandhaving en beide zijn niet vanzelfsprekend. Nederland is in dit opzicht bijzonder laks
Gemiddeld krijgt een chauffeur van een personenauto eenmaal in de 20.000 kilometer een boete (gegevens 2017). Bovendien zijn er veel apps die waarschuwen voor naderende snelheidscontroles. Gezien de risico’s van te snel rijden en de regelmaat waarmee dit gebeurt, draagt de lakse wijze van rechtshandhaving bij aan het aantal verkeersdoden.
De bijdrage van de automatisering aan veiligheid van het verkeer
De laatste jaren is de hoeveelheid elektronica in auto’s drastisch toegenomen. Eerst katalysatoren, dan ATB en andere systemen die auto’s op het goede spoor houden, om nog maar te zwijgen van navigatie en automatisch parkeren. Ontwikkelingen die de basis hebben gelegd voor autonome auto’s. In het navolgende wordt de voortgang van de automatisering en de impact ervan op de veiligheid onderzocht.
Wanneer zijn auto’s onder alle omstandigheden (dag, nacht, stadscentrum, platteland, regen, mist of sneeuw) veilig?
- Ze communiceren feilloos met hun omgeving (gebouwen, andere auto’s, fietsen, voetgangers, spelende kinderen, dieren en objecten) dankzij hun sensoren, camera’s, lidar, radar en GPS;
- Ze beschikken over backups voor alle mechanische en digitale systemen die automatisch inschakelen;
- Ze gebruiken 3D-kaarten die tot op de centimeter nauwkeurig zijn en in realtime aangepast kunnen worden aan veranderende omstandigheden;
- Ze leren van ‘fouten’; dankzij kunstmatige intelligentie;
- Ze zijden altijd volgens de verkeersregels en gaan nooit sneller dan de voorgeschreven snelheid;
- Ze zijn volledig beveiligd tegen hackers
- Ze hebben geen chauffeur …..
Er is een groot verschil in de mate van automatisering van ‘zelfrijdende’ auto’s. Het is verhelderend om kennis te nemen van zes niveaus van automatisering die de Society of Automotive Engineers (SAE) onderscheidt (figuur hieronder)[11].
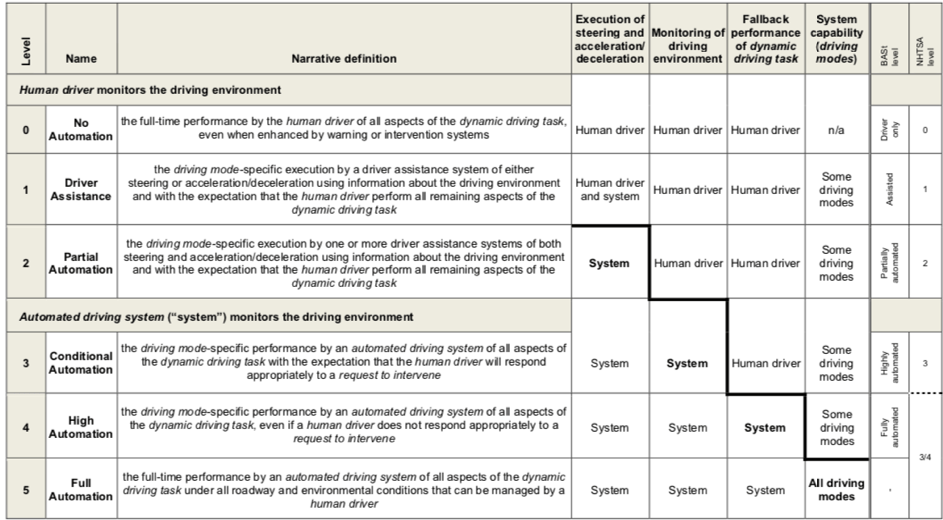
Volgens deze classificatie kunnen auto’s van SAE-niveau 2 autonoom sturen en de snelheid aanpassen in specifieke omstandigheden op autowegen. Onder deze omstandigheden kunnen bestuurders hun handen van het stuur houden, mits de nationale wetgeving dat toelaat. Zodra de omgeving sturen en accelereren complexer maakt, bijvoorbeeld na het inslaan van een drukke straat, moet de chauffeur direct overnemen.
Een goed werkend SAE niveau 3-systeem stelt bestuurders in staat hun ogen van de weg te houden en zich bezig te houden met andere activiteiten. Ook hier is de enige voorwaarde dat ze het rijden onmiddellijk overnemen zodra ‘het systeem’ een signaal daartoe geeft, wat betekent dat het de situatie niet langer aankan.
Voor goedkope taxidiensten zonder bestuurder is dit beheersingsniveau niet voldoende. Auto- en technologiebedrijven zoals Lyft, Uber en Google zijn druk doende om te voldoen aan de eisen van de hogere niveaus. Hun dure auto’s (tot $ 250.000) hebben geautomatiseerde backups, wat betekent dat ze elke situatie onder gespecificeerde omstandigheden, zoals goed ontworpen wegen, overdag en met een bepaalde snelheid aankunnen.
SAE-niveau 5 automatisering omvat de mogelijkheid om onder alle omstandigheden zonder bestuurder te rijden[12]. Geen van de bestaande modellen voldoet vooralsnog aan deze eisen[13].

Gezien deze classificatie verdient het de voorkeur om de term ‘zelfrijdende auto’ niet langer te gebruiken, maar om geautomatiseerde auto’s (SAE niveau 1,2 en 3) en van autonome auto’s (SAE niveau 4 en 5) te onderscheiden. In de eerste groep zijn altijd voorzieningen voor handmatig rijden aanwezig en moet de chauffeur plaatsnemen achter het stuur en stand-by zijn. De tweede groep kan rijden zonder bestuurder, in het geval van type 4 onder bepaalde omstandigheden. Ook in dit type is wel een stuurinrichting aanwezig voor interventies door een begeleidende safety driver.
Hoewel SAE-niveau 5 de uiteindelijke ambitie is, haast de auto-industrie zich niet om de bestuurder achter het stuur weg te krijgen.
De missie van de autoindustrie is het komende decennium zoveel mogelijk elektrische auto’s aan particulieren te verkopen, met automatische systemen als leuke extra’s.
Daarom is het consolideren van SAE-niveau 3 hun eerste prioriteit. Deze ingebouwde functies zullen bijdragen aan het veilige gebruik van auto’s als bestuurders er goed mee leren omgaan. Uit recent onderzoek van Connecting Mobility blijkt dat maar weinig automobilisten gebruik maken van geautomatiseerde systemen zoals Lane Departure Warning, Emergency Brake of Adaptive Cruise Control die vroegtijdige herkenning en vermijding van gevaarlijke situaties mogelijk maken[14].
Aan de andere kant kunnen technologische bedrijven zoals Google, Lyft en Uber niet wachten om SAE-niveau 4 te bereiken, wat de weg opent naar taxidiensten zonder chauffeur, zij het onder beperkende voorwaarden (rustige wegen, daglicht).
Er zijn ook verschillen in de manier waarop autofabrikanten de veiligheid van de auto’s verbeteren. Een optie is verbetering van de kwaliteit van de waarneming van de omgeving[15]. Een stap in deze richting is de lidar net zo goed maken als een camera die alles en altijd ziet[16]. De andere benadering is continue training van neurale netwerken. Dit is de strategie die Tesla volgt, die geen lidar inzet[17]. Alle beelden die afzonderlijke Tesla-auto’s niet kunnen ontcijferen en alle verkeerde inschattingen van de ‘automatische piloot’ die door de bestuurder worden gecorrigeerd worden geüpdatet naar Tesla’s training set, waardoor de autopilot steeds beter gaat functioneren. In de korte video hieronder legt Andrej Karpathy, Tesla’s directeur voor kunstmatige intelligentie, uit hoe dit proces werkt.
Vooruitgang
De afgelopen twee jaar zijn de speculaties over een invasie van autonome voertuigen op de weg rond 2020 verstomd.
Het toonaangevende marketingbedrijf Guidehouse Research Leatherboard concludeert: 2019 was een uitdagend jaar voor geautomatiseerd rijden (AD), aangezien de realiteit in het niet zinkt bij de gewekte verwachtingen[18]. Managers in de automobielindustrie worden steeds pessimistischer over het tempo van de implementatie van autonoom rijden en ze zijn trouwens ook pessimistisch over de groei van de markt voor elektrische voertuigen (EV’s).
Uber voorspelde 75.000 autonome voertuigen op de weg te hebben in 2019, zonder de aanwezigheid van een safety driver. Het werden er nul.
In plaats daarvan kondigde de nieuwe ceo Dara Khosrowshahi aan dat het meer dan 50 jaar zal duren voordat alle Uber-auto’s zonder bestuurder rijden. Zijn collega, ceo John Krafcik van Waymo, verwachtte dat het tientallen jaren zal duren voordat autonome auto’s wijdverbreid zijn maar ook dat niveau 5 waarschijnlijk onbereikbaar zal zijn[19]. De ceo van Volkswagen zei dat volledig zelfrijdende auto’s ‘misschien nooit’ op de openbare weg komen[20]. Dit in tegenstelling tot de beweringen van Elon Musk, dat alle Tesla-auto’s in 2020 niveau 5 zullen bereiken dankzij de nieuwe Full Self Driving Chip, die 36 biljoen bewerkingen per seconde kan uitvoeren.
Het menselijk brein kan veel beter dan welke machine ook bij complexe situaties op de weg te beoordelen. Kunstmatige intelligentie werkt vele malen sneller, maar de nauwkeurigheid en het adaptieve vermogen ervan laten nog veel te wensen over[21]. Auto’s zonder bestuurder worstelen met onvoorspelbaarheden veroorzaakt door kinderen, voetgangers, fietsers en andere door een mens bestuurde auto’s en ook met kuilen, omleidingen, versleten markeringen, sneeuw, regen, mist, duisternis enzovoort[22].
Ook verkeerslichten kunnen een probleem zijn; de hele wereld heeft kunnen zien hoe een Uber-auto door het rode licht rijdt.
Auto’s op niveau SAE 3 zijn mogelijk het echte probleem
Tot nu toe leek het erop dat bereiken van het SAE-veiligheidsniveau 5 het grootste probleem is. Er is echter een groeiend besef dat in het bijzonder SAE-niveau 3 het echte probleem is. Verkoopcampagnes wekken de suggestie dat bestuurders op SAE-niveau 3 een boek kunnen lezen als ze maar achter het stuur blijven zitten om de besturing over te nemen als het automatische systeem het sein geeft het niet meer aan te kunnen. Echter, volgens studies in gecontroleerde testomgevingen is de reactietijd van bestuurders die op het moment dat dit sein wordt afgegeven niet opletten te traag om onheil af te wenden[23].
Veilig rijden (niveau 2 – 3) vereist dat de bestuurder altijd alert is en klaar is om in te grijpen en dus geen boek zou moeten lezen.
Het gebruik van de term ‘automatische piloot’ moet worden verboden.
De Amerikaanse senator Edward Markey hekelde Tesla onlangs in het openbaar en eiste dat het deze functie hernoemt vanwege de mogelijk misleidende naam[24].
De auto-industrie heeft tot dusver 250 miljard euro geïnvesteerd in elektrische en autonome auto’s, iets wat een van de ceo’s downpaying on nothing noemde. Hier vindt u een overzicht van de voortgang van de belangrijkste ‘spelers’ in de auto-industrie die bezig zijn met het op de markt brengen van ‘zelfrijdende’ auto’s[25].
De redenen voor de U-bocht in het sentiment liggen voor de hand. Zoals onlangs werd onthuld, geloofden autofabrikanten zelf nooit hun eigen verwachtingen, maar om marketingredenen spraken ze elkaar na. Alle producenten van autonome auto’s realiseren zich dat de vereiste radar, lidar, AI-computing, 3D-kaarten (zie hier voor uitleg[26]) deze auto’s onbetaalbaar zullen maken, tenzij ze eigen rijstroken gebruiken, een beperkte snelheid hebben om in vrij kwartalen te werken.
Door deze complicaties hebben zowel Waymo als Cruise (GM) de start van hun commerciële taxidiensten vertraagd.
Toch rijden er in enkele steden zoals Detroit, Stockholm, Tallinn, Berlijn en in de nabije toekomst Amsterdam minibusjes zonder bestuurder. Het zijn kleine voertuigen met een maximumsnelheid van 25 km/u, rijden op een vrije rijstrook of in verkeersluwe straten en op een vaste route, voorlopig altijd vergezeld van een testrijder.

Lessen uit ongevallen
Er zijn een paar dodelijke slachtoffers gevallen met ‘zelfrijdende auto’s’ die inzicht geven in hun huidige zwakke punten[27]. Op 18 maart 2018 raakte een zelfrijdende auto van Uber een vrouw die met haar fiets de straat overstak. Op dat moment bekeek de verplichte ‘veiligheidsbestuurder’ achter het stuur de diagnostische instrumenten, wat was toegestaan. Minder dan een seconde voor de crash keek de chauffeur naar de weg en wist de snelheid te verminderen. Uit analyses achteraf bleek dat het systeem zes seconden voor de crash de vrouw identificeerde als ‘een onbekend object’ en 4,7 seconden later een noodstop wilde maken, maar het Uber-team deze functie uitgeschakeld.
Minder dan een week daarna veranderde een Tesla Model X zonder enige noodzaak van richting, raakte een betonnen barrière, vloog in brand en doodde de bestuurder. Net als bij een ander dodelijk ongeval met een Tesla Model S, had de bestuurder de ‘auto pilot’ ingeschakeld op een weg waar het gebruik daarvan niet was toegestaan en had hij ook zijn handen van het stuur gehaald.
Automobiel- en technologische bedrijven hebben autonome auto’s uitvoerig getest. Alleen Waymo telt 9 miljoen kilometer zonder zware ongevallen en bij geen enkel ongeval had de bestuurderloze schuld[28]. Tijdens al deze kilometers was echter een ‘safety driver’ veiligheidsbestuurder aan boord, die kwaad kon voorkomen.
Als de ongevallen waarbij Uber en Tesla zijn betrokken iets over veiligheid onthullen, dan is het dat de Volvo-auto’s van Uber zeker nog niet klaar zijn voor autonoom rijden op SAE-niveau 4, afgezien van het onverantwoordelijke gedrag van het team. Wat Tesla betreft, is overmatig vertrouwen op de ‘auto pilot’ (ergens tussen SAE-niveau 2-3) dodelijk gevaarlijk.
Legale aspecten
Vanuit het oogpunt van de verkeersregulering verschillen geautomatiseerde voertuigen (SAE Level 2 – 3, met een menselijke bestuurder) en autonome voertuigen zonder bestuurder (SAE Level 4 – 5) op een fundamentele manier. Regelgeving met betrekking tot autonome voertuigen heeft tot nu toe verhinderd dat auto’s zonder bestuurder op de weg verschenen.
De staat Californië heeft onlangs nieuwe regels voorgesteld om autonome auto’s toe te laten; verschillende andere staten in de Verenigde Staten volgden[29]. Als gevolg hiervan hebben Google en General Motors toestemming gekregen taxidiensten zonder bestuurder te lanceren, zij het met de verplichte aanwezigheid van een ‘safety driver’ in de testperiode. De trips worden met camera’s in de gaten gehouden om roekeloos gedrag of vandalisme te voorkomen[30]. Het testen van deze diensten is nog steeds aan de gang.
Tot nu toe, gaat de ontwikkeling van zelfrijdende auto’s uit van veilige deelname aan het verkeer dat wordt gedomineerd door “gewone” auto’s en andere weggebruikers.
Echte vooruitgang op het gebied van de veiligheid zal worden bereikt zodra zelfrijdende auto’s met elkaar kunnen communiceren en de aanwezigheid van door mensen aangedreven auto’s op de openbare weg verboden is, om nog maar te zwijgen van door paarden getrokken voertuigen[31].
Fietsen, voetgangers en overstekende kinderen blijven ‘een uitdaging’. Dit zal nog vele jaren duren en in de tussentijd zal de auto-industrie zich richten op de verkoop van elektrische auto’s op SAE niveaus 2 en 3. voor individueel gebruik.
Veiligheid en de humane stad
Het grote aantal dodelijke slachtoffers en zwaargewonden dat wereldwijd de prijs van het verkeer is, getuigt van een ernstig tekort aan humaniteit. Gegeven de vele andere aspecten waarbij het verkeer de leefbaarheid van steden schaadt, heeft een veranderend mobiliteitspatroon de hoogste prioriteit.
Veiligheid in het verkeer, zoals voorgeschreven in de Vision Zero Street Design Standard, levert een grote bijdrage aan de groei van humane steden.
De belangrijkste oorzaken van dodelijke ongevallen en ernstig letsel zijn te snel rijden en het ontwerp van de weg, in combinatie met het gebruik van drugs en alcohol, vermoeidheid en ziekte.
Het is riskant om te verwachten dat gedragsverandering van chauffeurs dit probleem kan oplossen. Daarom moeten de achterliggende oorzaken worden aangepakt. Dit omvat een fundamenteel herontwerp van de wegen. Dit omvatte aanpassing van de maximumsnelheid aan de belangrijkste weggebruikers van een straat en handhaving van deze snelheid. De andere maatregel is het verbeteren van de autoveiligheid. De veiligheid voor de autopassagiers is al aanzienlijk verbeterd, maar door hun ontwerp en snelheid zijn auto’s een steeds grotere bedreiging geworden voor voetgangers en fietsers. Autonome auto’s kunnen in theorie een zegen zijn voor de veiligheid, maar de voortgang in de ontwikkeling van de ondersteunende systemen stagneert. Tegelijkertijd kan vervanging door zelfrijdende auto’s door autonome auto’s leiden tot een verkeerchaos: Meer auto’s op de weg zullen leiden tot ongekende files.
In de meeste steden, met name in de Verenigde Staten, hebben auto’s (of hun chauffeurs) een onevenredig deel van de beschikbare ruimte ingenomen. Voetgangers, fietsers, scooters, trams en bussen worstelen voor het resterende deel. Daarom moeten autoriteiten de ruimte herverdelen op een manier die recht doet aan de veranderende mobiliteitsvoorkeuren van burgers en die is afgestemd op de doelstellingen inzake duurzaamheid, leefbaarheid en veiligheid[32].
Hieronder vat ik de essentie samen van een humane benadering van verkeersveiligheid
Principes voor een humane benadering van verkeersveiligheid
1. Het verminderen van de 1,35 miljoen doden en 20 miljoen ernstig gewonden per jaar als zijnde een wereldwijde en onderschatte menselijke ramp.
2. Het verbeteren van het ontwerp van de wegen, het waarborgen van de veiligheid voor voetgangers en fietsers bij het ontwerpen van de auto’s, en effectieve wetshandhaving moeten prioriteit krijgen.
3. De aanleg van verschillende soorten wegen, elk met een eigen maximumsnelheid, zal een belangrijke bijdrage leveren aan het verhogen van de verkeersveiligheid.
4. Systemen die snelheidscontroles melden, waaronder ook P2P, moeten worden verboden.
5. Alle auto’s moeten een black box hebben, die onder andere de snelheid registreert. Bij ongevallen of misdrijven kan deze worden geraadpleegd na goedkeuring door een rechter.
6. Vermindering van het aantal auto’s, bevordering van lopen of fietsen, gebruik van openbaar vervoer en afname van het aantal en de lengte van de verplaatsingen zullen het aantal verkeersongevallen verminderen.
6. In de binnenstad is de ruimte vooral bestemd voor voetgangers en fietsers. Auto’s mogen dit gebied binnen te komen als zij stapvoets rijden om de bereikbaarheid van hotels te behouden.
7. Vrij liggende fietspaden verbinden de belangrijkste bestemmingen binnen de stad. Om veiligheidsredenen geldt een maximumsnelheid, tenzij er ruimte is voor verschillende stroken voor langzame en snelle fietsers.
8. In plaats van de indeling op vijf niveaus van de SAE, is het logischer om een onderscheid te maken tussen twee opties – geassisteerd of autonoom -. In geval van ‘geassisteerd rijden’ dient de bestuurder altijd attent te zijn en in staat zijn om onmiddellijk in te grijpen. Het gebruik van de term “automatische piloot” moet worden verboden.
9. Op den duur is een systeem dat wordt gedomineerd door autonome auto’s niet compatibel met bestuurde voertuigen. Op dat moment zouden deze verboden moeten worden op voor auto’s bestemde wegen.
[1] https://www.who.int/news-room/fact-sheets/detail/road-traffic-injuries
[3] https://www.fastcompany.com/90460862/scientists-analyzed-1700-cities-and-determined-how-to-design-safe-streets?utm_campaign=eem524:524:s00:20200211_fc&utm_medium=Compass&utm_source=newsletter
[4] https://www.thelancet.com/journals/lanplh/article/PIIS2542-5196(19)30263-3/fulltext
[5] https://www.fastcompany.com/90310016/the-urban-design-problem-thats-killing-pedestrians-and-cyclists
[6] https://eu.freep.com/story/money/cars/2018/06/28/suvs-killing-americas-pedestrians/646139002/
[7] https://www.rospa.com/rospaweb/docs/advice-services/road-safety/vehicles/pedestrian-protection.pdf
[8] https://www.visionzerostreets.org
[9] https://www.visionzerostreets.org
[10] https://vancouver.ca/files/cov/design-guidelines-for-all-ages-and-abilities-cycling-routes.pdf
[11] https://www.nhtsa.gov/technology-innovation/automated-vehicles-safety#topic-road-self-driving
[12] https://medium.com/@miccowang/autonomous-driving-how-autonomous-and-when-ce08182cfaeb
[13] https://www.engineering.com/DesignerEdge/DesignerEdgeArticles/ArticleID/15478/Driverless-Cars–The-Race-to-Level-5-Autonomous-Vehicles.aspx
[15] https://medium.com/kredo-ai-engineering/making-sense-of-sensing-in-self-driving-cars-3d469c6e5e33
[16] https://medium.com/ouster/the-camera-is-in-the-lidar-6fcf77e7dfa6
[17] https://towardsdatascience.com/teslas-deep-learning-at-scale-7eed85b235d3
[18] https://guidehouseinsights.com/reports/guidehouse-insights-leaderboard-automated-driving-vehicles
[19] https://www.fastcompany.com/90374083/for-years-automakers-wildly-overpromised-on-self-driving-cars-and-electric-vehicles-what-now?utm_campaign=Compass&utm_medium=email&utm_source=Revue%20newsletter
[20] https://www.vox.com/future-perfect/2020/2/14/21063487/self-driving-cars-autonomous-vehicles-waymo-cruise-uber
[21] https://medium.com/predict/we-automate-the-driver-not-the-car-d95a0f67a733
[22] https://medium.com/reclaim-magazine/all-hail-the-robot-car-8d672221b18e
[23] https://www.autoblog.com/2017/01/27/autonomous-cars-reaction-time-study/
[24] https://medium.com/fast-company/how-the-race-to-autonomous-cars-got-sidetracked-by-human-nature-7b709e766823
[25] https://medium.com/swlh/mapping-the-autonomous-vehicle-ecosystem-3cd14fd6d750
[26] https://medium.com/swlh/a-beginners-guide-to-self-driving-cars-5bbc2bb798d4
[27] https://medium.com/@parismarx/are-self-driving-cars-really-safer-than-human-drivers-56a72bde2f41
[28] http://www.umich.edu/~umtriswt/PDF/UMTRI-2015-34_Abstract_English.pdf
[29] https://www.wired.com/story/californias-plan-regulate-self-driving-car-biz/
[30] https://medium.com/s/story/the-future-of-mobility-belongs-to-people-not-self-driving-cars-625c05b29692
[31] https://www.fhwa.dot.gov/pressroom/fhwa1703.cfm
[32] https://medium.com/s/story/the-future-of-mobility-belongs-to-people-not-self-driving-cars-625c05b29692
